The intralogistics industry is standing on the edge of a monumental shift. For years, the development of Automated Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs) has been based on adding one sensor for navigation, another for safety, a camera for object detection, and yet another for pallet recognition. This approach has inflated Bills of Materials (BOMs), complicated software integration, and extended deployment times.
At GIM Robotics, we have spent over a decade perfecting 3D localization and perception software in some of the harshest outdoor environments on the planet. Now, thanks to the imminent market arrival of PL-d certified 3D safety LiDARs, we are bringing that hardened technology indoors. The era of 3D safety LiDAR is here, and paired with GIM Robotics’ highly optimized positioning and perception solutions, it represents a revolutionary step forward for AGV and AMR providers.
In this comprehensive deep dive, we will explore the evolution of 3D LiDAR, the limitations of current 2D sensor architectures, and how OEMs can fundamentally rethink their vehicle designs to achieve unprecedented autonomy, safety, and cost-efficiency.
From outdoor extremes to indoor precision
The foundation of GIM Robotics dates back long before our official establishment as a private company in 2014. Our roots lie at Helsinki University of Technology (Aalto University since 2010), where one of our founders, late Professor Aarne Halme, established the Automation Technology Laboratory in 1985.
From the very beginning, lab’s focus was exclusively on outdoor, mobile, and heavy-duty machines. During the five-year period (2008-2013) operating as a Center of Excellence awarded by the Academy of Finland, we developed the foundational modules for what we termed “Generic Intelligent Machines” (the origin of the GIM acronym). We built the perception, control, and remote operation stacks required to make heavy machinery fully autonomous.
Since transitioning to the commercial sector over twelve years ago, our software has been deployed in incredibly demanding applications. We have automated heavy street sweepers (such as those by Trombia Technologies) navigating complex urban environments. We have deployed our systems in agriculture for swath following, in forestry for navigating dense tree lines, and in maritime applications for sensor fusion and collision avoidance. In the public transit sector, all new Skoda Trams sold in Europe utilize GIM Robotics technology for 3D localization and collision avoidance, relying on massive, highly detailed 3D maps of cities like Prague. See some of our public customer references here.
Being a Finnish company, when we talk about localization and navigation in harsh environments, we are talking about surviving heavy snow, blizzards, and dramatically shifting seasonal landscapes. An environment where the ground, the obstacles, and the weather are constantly changing demands a localization stack that is incredibly robust, highly adaptable, and strictly volumetric.

For years, we successfully applied this 3D technology to outdoor logistics, solving problems that traditional GNSS, odometry, or 2D LiDAR systems simply could not handle. However, the intralogistics and indoor AMR market presented a different challenge. Indoor navigation was largely considered solved by 2D LiDARs, and the prohibitive cost of 3D sensors kept them out of high-volume indoor fleets.
Until now.
The additive complexity in AGV/AMR design
The traditional indoor logistics market is matured. As we frequently hear from our OEM partners, the low-hanging fruits in warehouse automation have already been picked. Today’s end-users are starting to ask proven automation for highly complex, highly dynamic environments: facilities with rapidly changing pallet stacks, mixed human-robot traffic, overhanging obstacles, and tight aisles.
To meet these demands using traditional 2D technology, AGV and AMR manufacturers have been forced into a corner of additive complexity. Let us examine the sensor architecture of a typical, modern, high-end automated reach truck or complex AGV:
- Safety Navigation (2D): A 2D safety scanner placed near the floor to comply with ISO 3691-4 standards.
- Primary Navigation (2D): Because the floor-level safety scanner is easily blinded by low-lying dynamic obstacles or temporary pallets, a second 2D LiDAR is often mounted higher up purely for navigation.
- Overhanging Object Detection: 2D LiDARs only see a single slice of the world. They cannot detect an opening door midway up, or a forklift tine protruding at chest height. To solve this, OEMs add 3D LiDAR domes, stereo cameras, or depth cameras facing forward.
- Pallet Detection: To accurately engage with loads, specialized depth cameras or additional sensors are added to the forks or mast.
- Rear Safety: Additional 2D safety scanners are placed at the rear to ensure 360-degree coverage.
This architecture is a nightmare. It requires the OEM to source hardware from multiple vendors, write custom integration layers to fuse different data streams, and physically mount, cable, and calibrate a half-dozen instruments.

Financially, it is incredibly burdensome. Based on current market averages, the Bill of Materials (BOM) for the sensor suite on a traditional complex AGV can easily range from €7,000 to over €9,400.
Furthermore, even with this massive array of sensors, the vehicle still suffers from fundamental blind spots. It is attempting to understand a 3-dimensional dynamic world using data from 2-dimensional slices from lidar and from narrow-field cameras.
The turning point: the arrival of PL-d 3D safety LiDAR
The bottleneck preventing 3D LiDAR from dominating indoor logistics has always been cost and safety certification. In 2014, a standard Velodyne 3D LiDAR cost upwards of €30,000, later dropping to €8,000. These prices were acceptable for R&D or low-volume heavy outdoor machinery, but impossible to justify for a warehouse tugger. Over the last few years, we saw the rise of mid-range 16-line and 32-line LiDARs, and low-cost non-safety 3D LiDARs designed for hobbyists or non-critical industrial obstacle detection.
However, the true strategic inflection point has finally arrived. Major sensor manufacturers—including SICK, RoboSense, and Benewake—are now bringing Performance Level D (PL-d) certified 3D safety LiDARs to the market.
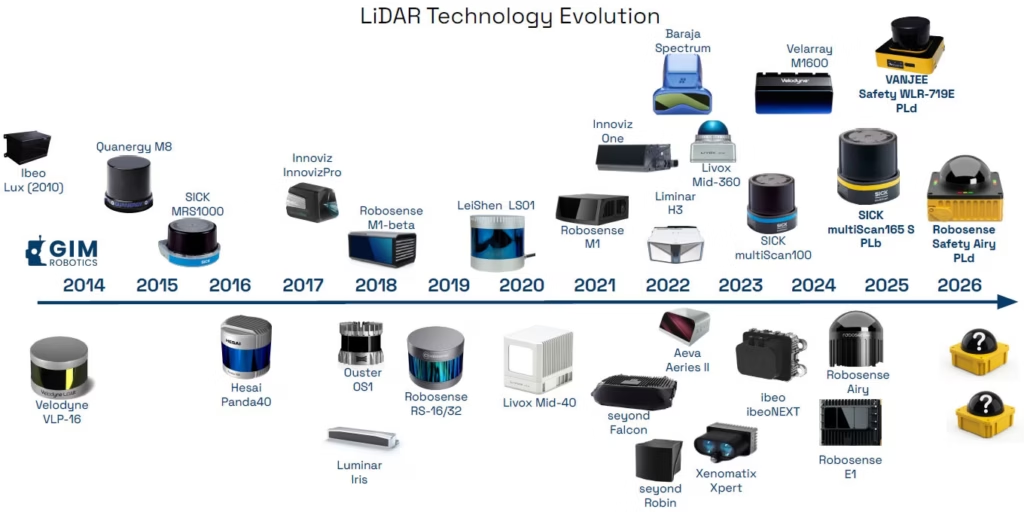
These are not prototype devices; they are commercial products designed specifically as plug-and-play replacements for 2D safety scanners. They offer 360-degree horizontal fields of view, massive vertical fields of view (creating a true protective virtual dome around the vehicle), which is capable of providing the detection even dark, matte, objects at 30 meters. Most importantly, the target price for these 3D safety LiDARs is hovering around €2,000.
This price point shatters the existing paradigm. For the cost of a single, traditional 2D safety scanner, an OEM can now purchase a fully certified 3D safety LiDAR that provides exponentially more environmental data. The hardware is here. The challenge now shifts to the software: How do you efficiently process millions of 3D data points in real-time to control a vehicle safely and accurately?
The GIM Robotics advantage: NDT and software efficiency
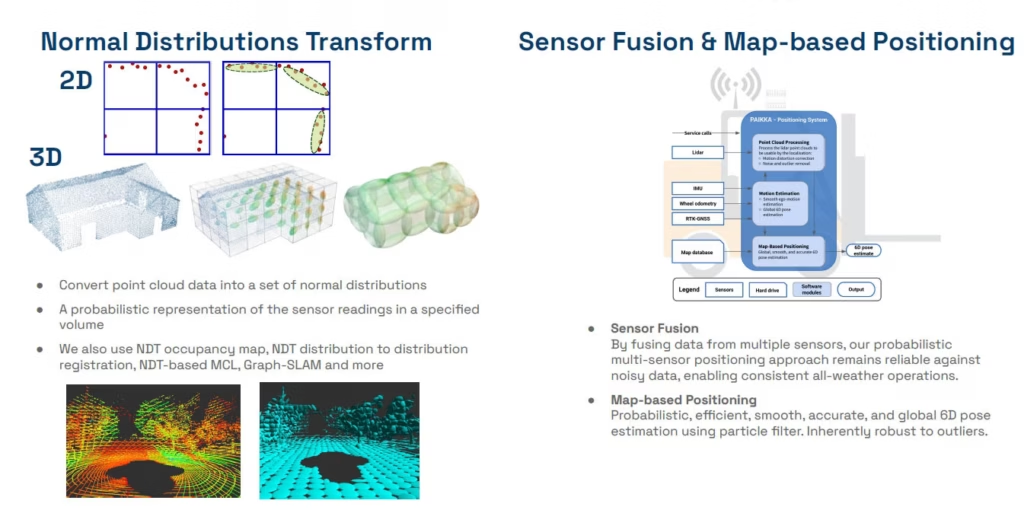
Processing 3D point cloud data is computationally heavy. If you attempt to use traditional brute-force point-to-point registration algorithms (like standard Iterative Closest Point, or ICP), you will require a massive, power-hungry onboard computer – negating the cost savings of the new sensors. GIM Robotics solves this through our proprietary application of the Normal Distribution Transform (NDT).
Instead of treating the world as a rigid grid of binary occupied/unoccupied squares (as in 2D navigation) or millions of individual points, our software represents the 3D environment spatially and probabilistically.
When a 3D LiDAR scans a room, our software divides that 3D space into voxels, i.e., into volume elements, a kind of 3D pixels. If physical points fall into a voxel, we do not save the individual points. Instead, we represent the occupation of that voxel with a normal distribution—essentially calculating the mean and covariance of the points in it. Visually, this creates a map made of ellipsoids.
This approach offers profound advantages for AGVs and AMRs:
- Massive Data Compression: We maintain high-fidelity feature representation of the environment using a fraction of the data.
- Computational Efficiency: Registration is performed NDT-to-NDT rather than point-to-point. This allows our localization software to run smoothly in real-time on standard, cost-effective industrial PCs (like ARM processors or standard x86 industrial box PCs).
- True 6-DoF Localization: Our system localizes the robot in Six Degrees of Freedom: X, Y, Z, Roll, Pitch, and Yaw. If the floor is uneven, or if the robot traverses a ramp, the system understands its exact orientation in 3D space, preventing the map-slipping errors common in 2D systems.
- High Dynamic Tolerance: In warehouses where the floor level is constantly changing (pallets being moved, forklifts driving by), our software can dynamically filter the environment. We can configure the system to ignore the highly dynamic floor zone and localize using the static ceiling, structural pillars, and high racking.
Our NDT-powered software stack is not an academic experiment; it represents over 40 man-years of rigorous productization. It is a turnkey solution designed for OEMs, complete with fleet management interfaces, mapping tools, configuration utilities, and deployment software.
Rethinking vehicle architecture by slashing the BOM
With PL-d 3D safety LiDARs entering the market and GIM Robotics software providing the processing brain, OEMs can fundamentally redesign their vehicles. Let’s look at the financial and architectural impact of this transition.
USE CASE 1: The Automated Tugger
A traditional automated tugger relies on a 2D safety LiDAR for navigation and safety (€1,500 – €2,000). However, if the facility has overhanging obstacles, the OEM must add a 3D dome LiDAR for obstacle detection (€800) or a secondary navigation scanner if the floor is too dynamic. Total BOM: ~€3,000 – €4,600.
The 3D Revolution: By equipping the tugger with a single 3D safety LiDAR at the front base (approx. €2,000), the OEM achieves safety certification, robust 3D NDT localization, and complete volumetric overhanging obstacle detection. The BOM is halved, wiring is reduced to a single sensor, and the software stack is unified.
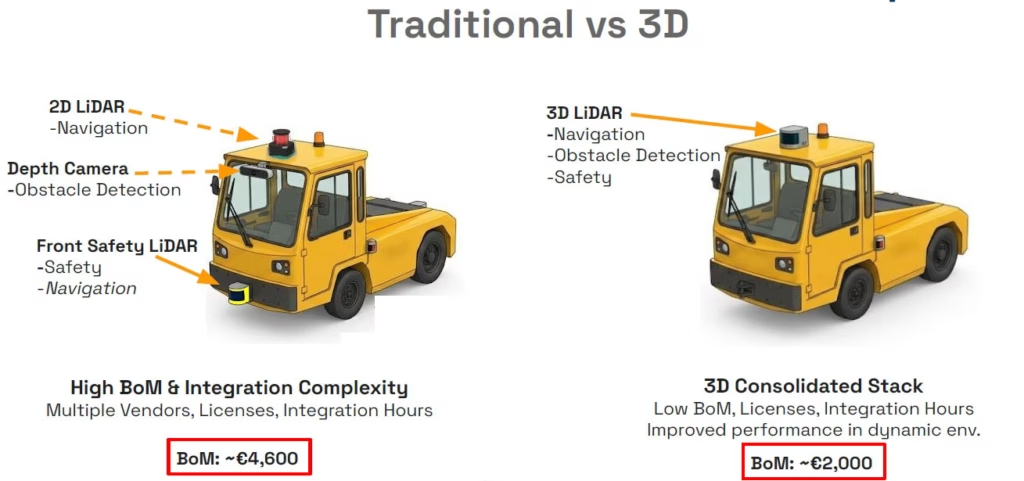
Figure 5: Hardware consolidation & business impact (traditional vs. 3D) for a tugger.
USE CASE 2: The Complex Reach Truck / Forklift
As discussed earlier, a high-end reach truck traditionally requires a massive sensor suite: Front safety (2D), rear safety (2D), navigation (2D), overhanging obstacle detection (3D dome/camera), and pallet detection (depth camera). Total BOM: €9,400+.
The 3D Revolution: This entire array can be replaced by two 3D safety LiDARs – one mounted at the front, one at the rear.
- Safety: The two sensors create a complete, overlapping 3D volumetric safety bubble around the entire vehicle, easily covering blind spots near the outriggers and high up on the mast.
- Navigation: The combined 3D point cloud provides an incredibly rich map for GIM’s NDT localization, pulling data from the floor to the warehouse ceiling.
- Obstacle & Pallet Detection: Because the LiDARs see the entire volume, they can be utilized to detect the specific shapes of pallets and verify pocket depth without needing a dedicated fork camera.
Total New BOM: Two 3D safety LiDARs at ~€2,000 each brings the sensor cost to roughly €4,000 – €4,600.
The OEM saves nearly €5,000 per vehicle in hardware alone, while simultaneously upgrading the machine from a 2D slice-viewer to a fully volumetric, highly autonomous robot capable of navigating environments that would paralyze a traditional AGV.
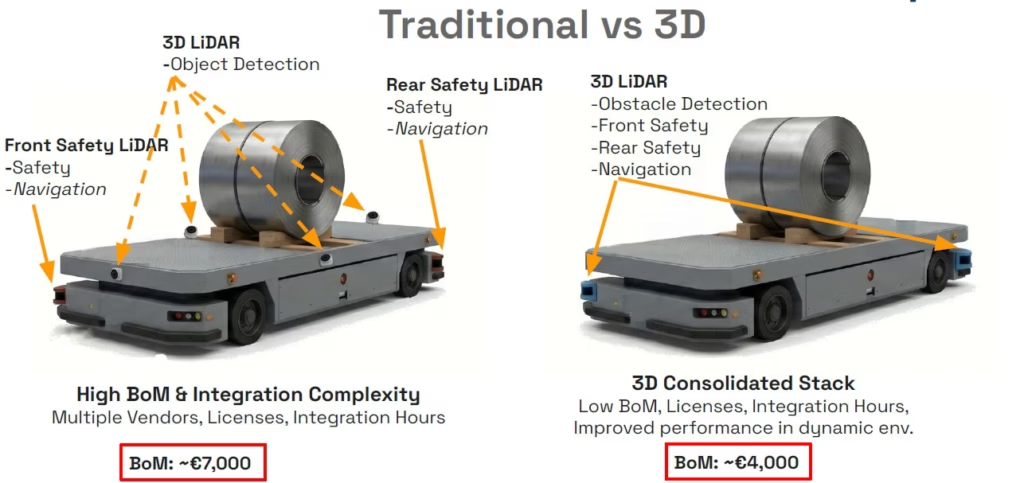
Figure 6: Hardware consolidation & business impact for a flat bed.
Uncompromising accuracy and benchmarking
Reducing costs and simplifying hardware is only valuable if the performance meets or exceeds industrial standards. At GIM Robotics, we have rigorously benchmarked our 3D navigation software against the industry’s strictest requirements.

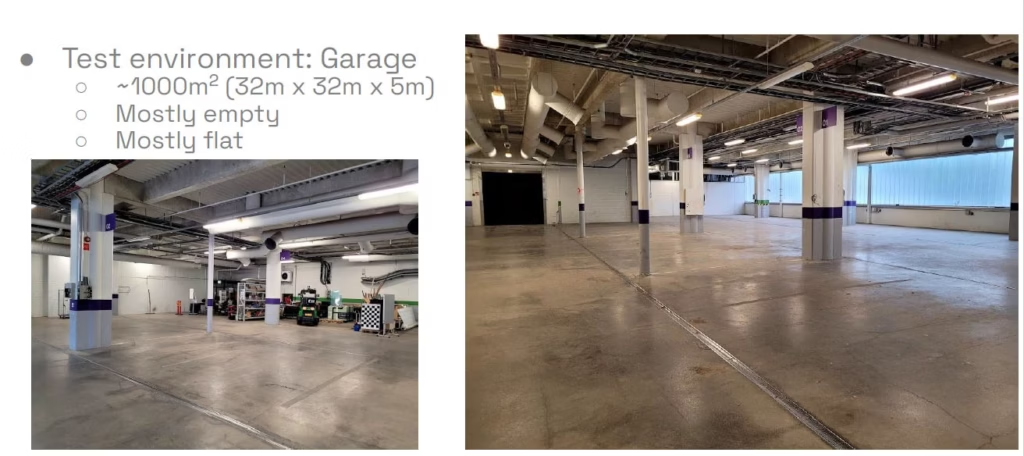
Figure 7: GIM Robotics’ test setup.
During extensive full-trajectory testing, we mapped vehicles moving at standard operational speeds (over 1.5 meters per second) through complex indoor environments. We utilize an independent, highly accurate extrinsic calibration and tracking tool (involving laser markers and ground truth measurement systems) to compare our NDT 3D positioning against absolute truth.
The results were definitive:
- Trajectory Accuracy: Across a full, complex trajectory, our 3D localization maintains a Root Mean Square Error (RMSE) of roughly 1 centimeter (±1 cm).
- Docking Repeatability: Maximum errors remain tightly constrained, easily meeting the millimeter-level precision required for high-tier pallet racking and automated docking maneuvers.
- Safety Compliance: Because the 3D LiDAR provides full volumetric data, OEMs can easily pass rigorous ISO 3691-4 test protocols (such as the Test Piece AB detection at various heights) without needing to blindly guess the optimal height to mount a 2D scanner. The 3D safety LiDAR sees the test piece regardless of where it is placed in the volume.
It is important to note that when discussing docking accuracy, the total system error includes the physical control error of the vehicle’s motors and brakes. Our localization software provides the precise coordinates; when paired with high-quality drive systems, the resulting docking is flawless.
The strategic imperative for AGV and AMR providers
The intralogistics market is entering a new phase of competition. End-users are no longer impressed by robots that can drive in straight lines down empty, static aisles. They want automation in chaotic, human-dense, highly dynamic warehouses. They want robots that can safely navigate around protruding forklift forks, ignore moving pallet stacks, and dock with millimeter precision.
OEMs attempting to solve these modern problems with legacy 2D technology will find themselves trapped in a cycle of shrinking margins, skyrocketing integration costs, and endless hardware troubleshooting.
The arrival of the 3D safety LiDAR is not just a hardware upgrade; it is definitely a full-scale paradigm shift. It allows you to dramatically reduce your Bill of Materials, eliminate the complexity of multi-sensor fusion, and deploy vehicles faster.
However, hardware is only as good as the brain processing it. To truly unlock the potential of these new PL-d 3D sensors, you need a localization and perception stack built specifically for volumetric data. GIM Robotics has spent 12 years building exactly that. Our NDT-based software is mature, field-tested, highly efficient, and ready to be integrated into your fleet today.
We are actively partnering with forward-thinking OEMs to implement this next-generation architecture. The 3D revolution is not a distant future – the sensors are hitting the market right now, the software is proven, and the commercial advantage is waiting to be seized.
Are you ready to build the future of mobile robotics?
Contact us today to discover how our 3D positioning and perception solutions can transform your AGVs and AMRs into the most capable, cost-effective machines on the market. We will tell you more about the results from the abovementioned tests with those reasonable priced 3D LiDARs – they are almost too good to be true.
NOTE: The above text is based on the Webinar “One Sensor: Total Autonomy” organized by AGV Network and presented by our CTO and co-founder Dr. Jose Luis Peralta.
See the Webinar.
{kind=link}